الوضع الليلي


 2:11:9
2:11:9  2026-07-01
2026-07-01  42
42
A Sahara Desert lizard has inspired a new approach to Mars rover mobility. The research could lead to more capable explorers able to navigate sandy landscapes with greater ease.
One of the biggest challenges for Mars rovers is simply staying mobile. Fine, loose sand can cause wheels to slip, sink, or become trapped—a problem that has hindered multiple planetary missions over the years. Now, researchers at the University of Würzburg have turned to an unlikely source for a solution: a small Sahara desert lizard that “swims” beneath the sand with remarkable ease.
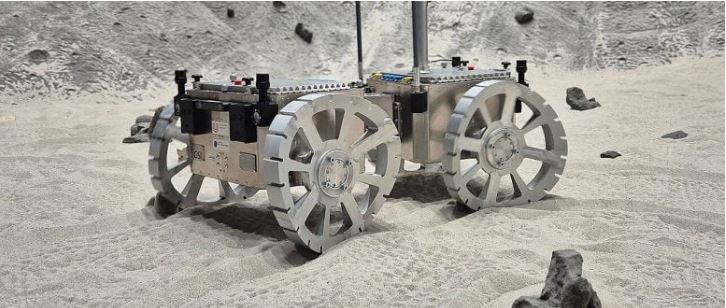
Known as the sandfish (Scincus scincus), the reptile dives below the surface and propels itself through loose sand to escape predators and hunt prey. Scientists have only recently unraveled the mechanics behind this unusual form of locomotion. Using those insights, the Würzburg team has developed an experimental Mars rover with bio-inspired wheels that outperform conventional designs on sandy terrain.
The project is led by computer scientist Marco Schmidt, Professor for Embedded Systems and Sensors for Earth Observation (ESSEO), in collaboration with researchers in Bremen as part of the German Aerospace Center’s VaMEx initiative.
Inspired by biology: rover with innovative wheels
Mars rovers must stay mobile across sand, loose rock, slopes, and uneven terrain while remaining stable and energy efficient. “Conventional wheel designs are often optimized for driving at low speeds and tend to slip, sink, or get stuck on soft ground,” says Amenosis Lopez, a researcher working with Professor Schmidt.
To address that problem, the Würzburg-led team designed new rover wheels inspired by the sandfish lizard. Instead of simply rolling over loose material, the wheels move through sand in a swimming-like pattern: “The wheels mimic the animal’s characteristic interaction with the ground, generating both longitudinal and lateral forces. The rover leaves sinusoidal tracks in the sand – this confirms that the intended swimming mechanism has been achieved.”
Experimental validation and further improvement
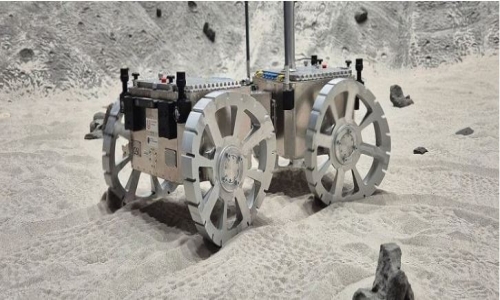
Schmidt’s group evaluated the rover on sand and in an open field with partners at the German Research Center for Artificial Intelligence (DFKI) in Bremen and the University of Bremen. The tests showed that the vehicle could move steadily across sandy terrain.
“The experiments also provided us with clear pointers for improvements,” says the Würzburg professor. The first Sandfish wheels were heavier and narrower than similar pneumatic wheels. That combination increased ground pressure, causing the rover to sink. Slipping and sinking then reinforced each other, making the rover harder to control.
The team improved the design by making the wheels wider and reducing their weight. Those changes lowered ground pressure, reduced slipping, and improved both stability and control. “Further refinements to the wheel surface are likely to further improve performance on mixed terrain,” the researchers predict.
Beyond the hardware: towards intelligent mobility
The ESSEO team also plans to move beyond mechanical design and expand its VaMEx work into software-guided mobility.
The goal is to create control strategies that directly account for slipping, sinking, and the way wheels interact with loose terrain. Such software could help the rover move more reliably and adaptively in sand and other granular environments.
Reality Of Islam |
|
A Sahara De

A new study
Researchers
 9:3:43
2018-11-05
9:3:43
2018-11-05
10 benefits of Marriage in Islam
7:5:22
2019-04-08
benefits of reciting surat yunus, hud &
9:45:7
2018-12-24
advantages & disadvantages of divorce
11:35:12
2018-06-10
6:0:51
2018-10-16
6:0:8
2023-03-19
10:55:53
2022-06-13
the happy life of mankind requirement
6:36:36
2022-01-25
2:5:14
2023-01-28
al-hussain (peace be upon him)
10:18:1
2022-09-21
7:32:24
2022-02-14
12:10:56
2022-11-17
5:41:46
2023-03-18
| LATEST |
 HOME
HOME